
Геоскан Локус УЗ-навигация — ультразвуковая локальная система навигации, которая решает задачу определения местоположения объекта (например, беспилотного летательного аппарата), в том числе и в помещениях, где сигналы спутниковых систем навигации недоступны.
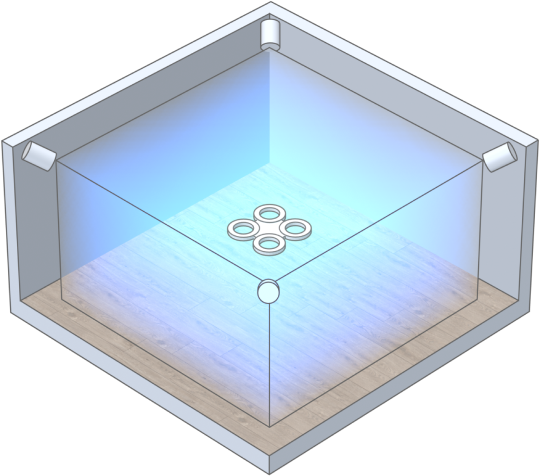
Она позволяет создать контролируемое полетное пространство, обеспечивает безопасное управление квадрокоптерами, независимо от других систем навигации, и позволяет добиться точности ±2 см в горизонтальной плоскости и ±5 см в вертикальной.
Образовательные продукты Геоскана соответствуют Приказу Министерства просвещения Российской Федерации от 28.11.2024 № 838.
 Максимальный охват: 10×10×4 м
Максимальный охват: 10×10×4 м
 Частота обновления данных до 100 Гц
Частота обновления данных до 100 Гц
 Точность координат ±2 см по горизонтали
Точность координат ±2 см по горизонтали
 Точность координат ±5 см по вертикали
Точность координат ±5 см по вертикали
Как это работает
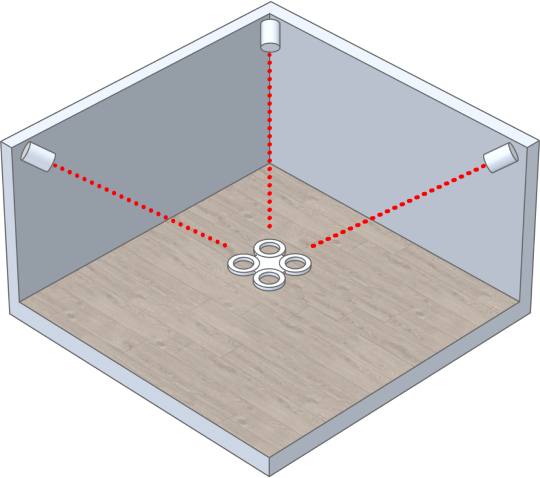
Местоположение коптера определяется как точка пересечения четырех сфер, у которых центры — маяки, а радиусы — расстояния до маяков от коптера. Эти расстояния можно определить, зная время и скорость прохождения сигнала от коптера до каждого маяка.
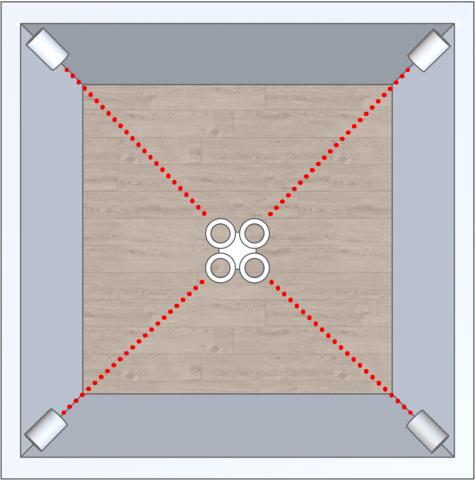
В нашей системе маяки — это ультразвуковые излучатели. Бортовой модуль с приемниками находится у коптера сверху, поэтому для корректной передачи сигнала маяки должны быть выше беспилотника. Для навигации нужен сигнал хотя бы с трех маяков. Четвертый повышает точность определения координат и выступает как резервный при отсутствии видимости одного из излучателей.
Оптимальным является расположение маяков на высоте 3,5 м в вершинах квадрата 5×5 м. Учитывая зависимость скорости звука от температуры воздуха, для получения наилучших результатов позиционирования рекомендуется использовать систему при температуре 20±5 градусов.

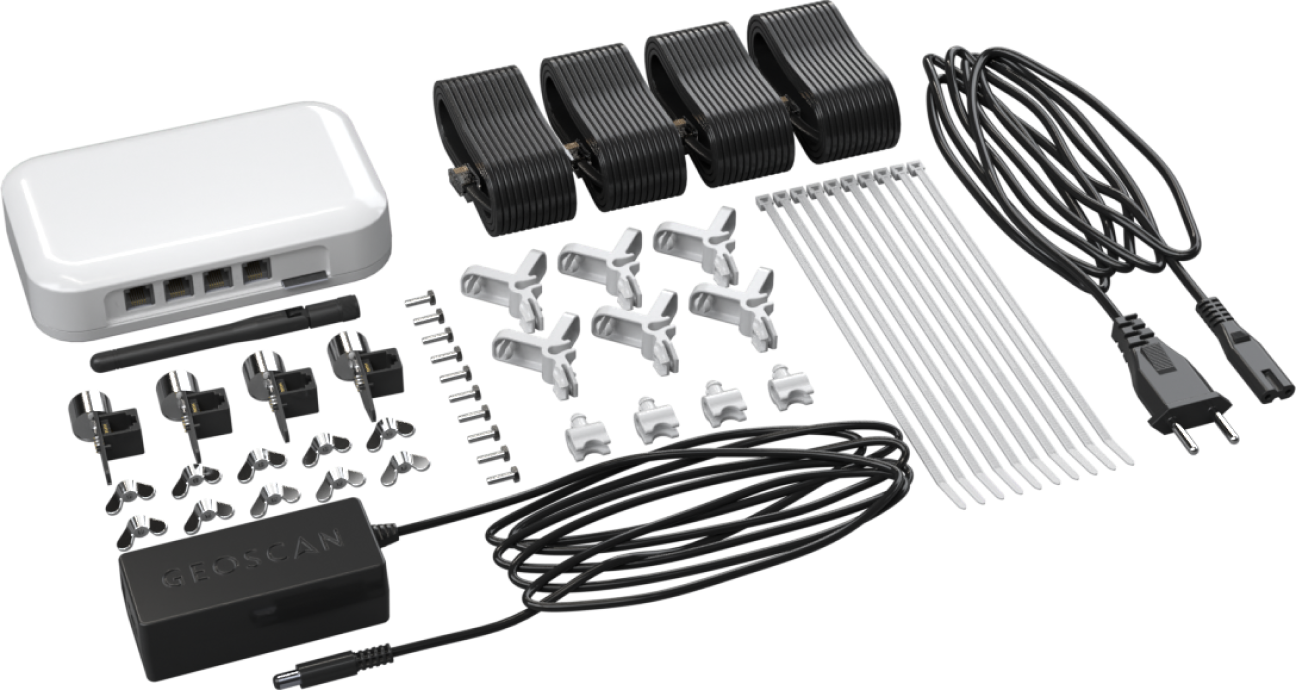
Модуль управления
Для приема сигнала с коптера
Находится внутри блока управления. Выступает в качестве приемника, улавливая сигналы от бортового модуля. После чего идет вычисление скорости и координат. Для вычисления координат используется метод трилатерации.



Бортовой модуль
Для приема сигнала с маяков
Дополнительный модуль, не входит в комплект системы навигации. Необходим для каждого дрона. Предназначен для того, чтобы коптер мог принимать сигналы с ультразвуковых излучателей обрабатывать и передавать информацию на модуль управления.
подробнее
Единая навигационная среда для робототехники




Простая установка


Здесь вы можете скачать необходимые документы и инструкции для установки и настройки системы УЗ-навигации
HEY
HEY
с командой единомышлен-
никовединомышленников!


































 Свежее
Свежее




